When you deal with 3d computer graphics you become familiar with rotation matrices and how to use them in order to rotate points in space. I want to give a short straight forward summary of rotation matrices regarding vector basis change.
The motivation for this article was the problem of rotating an object around global axis versus rotating it around local axis. To understand the involved matrices I found it useful to clarify what a rotation matrix actually does.
The common standard matrices for rotations around X, Y, Z axis rotate a point around the respective world axis. Let’s take the simple rotation matrix 





In order to rotate a vector 


Constructing a rotation matrix
Let us analyse how the matrix
- Derive the rotated coordinates of both base vectors of the standard basis in
- Write the coordinates of each rotated base vector as a column vector into a matrix.
The standard basis in 

The coordinates of both base vectors being rotated depend on the rotation angle:

The two image vectors form our rotated basis and are taken as column vectors to form our final rotation matrix
So, constructing a rotation matrix is a straight forward task. We observed that a rotation matrix represents a vector basis and contains the mapped base vectors in its columns. You can find more information on vector basis and transformations between them here.
Active rotation vs. vector basis change
Like every change of basis matrix a rotation matrix transforms the coordinates of a multiplied vector

The usual way to interpret this term means to interpret the rotation as an active task: The rotation matrix rotates the given vector 

Actually the matrix multiplication performs a linear combination of the base vectors of 


The strange thing for me is here that we assume

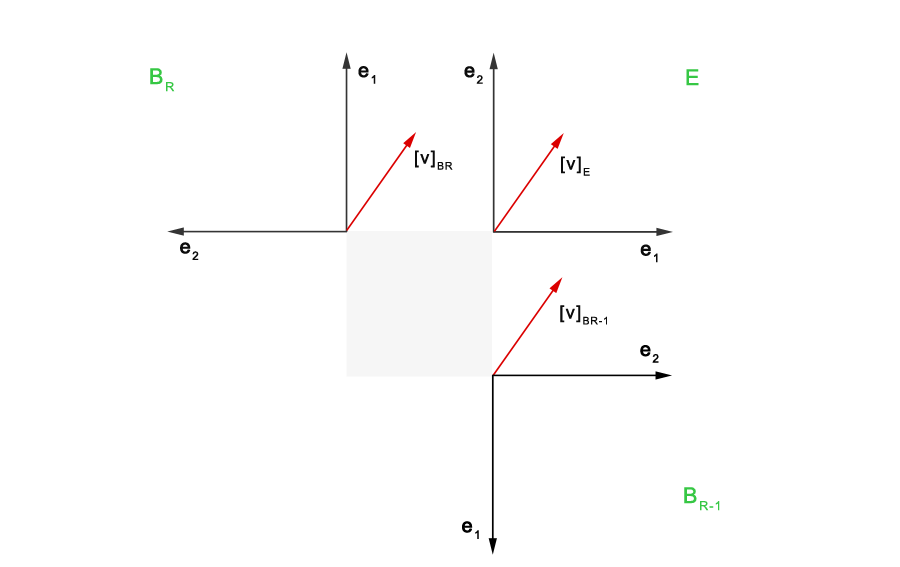
The active side shows the usual rotation interpretation. The passive side clarifies the vector basis change notion in two steps. You see how
In literature you will often find active transformations versus passive transformations. Passive transformations are described as transformations on the coordinate system (basis) rather than the vector itself. Thus active and passive transformations are always inversely related to each other. Either you rotate a vector by 90° or you rotate the basis by -90° to have the same resulting vector coordinates. The vector basis change we observe here is a quite similar interpretation to a passive transformation. The passive side of the illustration above might also express a rotation of the coordinate system inversely to the rotation we actually wanted to apply on our vector. I think this is the more geometric notion for the passive interpretation. Changing the vector basis instead is a more mathematical way of thinking.
Inverting vector basis change
So far we applied the straight forward constructed rotation matrix
- rotation matrices are square matrices
- rotation matrices are orthogonal matrices
- rotation matrices represent a orthonormal basis
From property 1. and 2. we know that the inverse of a rotation matrix is derived by transposing the rotation matrix. This is quite comfortable for 3d applications as transposing a matrix is much cheaper than inverting it. We consider here a vector basis

We know from the preceeding sections that if we put both base vectors as column vectors into a matrix we have yet constructed a rotation matrix that rotates a vector by 90° in counter clock wise direction. From this matrix we can easily derive its inverse by transposing it.


In terms of vector basis change the matrix 
Let us notate the vector basis represented by

This is a basis derived from the standard basis being rotated by -90° (clock wise direction). Represented by the matrix 
To summarize this, we observed that in order to transform coordinates into a given vector basis we need the inverse of its change of basis matrix. For rotation matrices we generate the inverse by transposing the matrix.
Author: Michael Keutel | 06.05.2015
Useful article! Thank you, really!
Thanks a lot, Michael! Your article helped me understand the idea of active and passive rotations.
Thank you for posting this, this is very helpful. Please consider changing the font styling so users can instead font size. It’s very hard to read on mobile. I can zoom in, but then have to scroll right and left a bunch. When the website follows browser fint settings the text reflows instead. It might not look quite as nice, but it’s much more accessible. Thank you.
amazing article. thanks